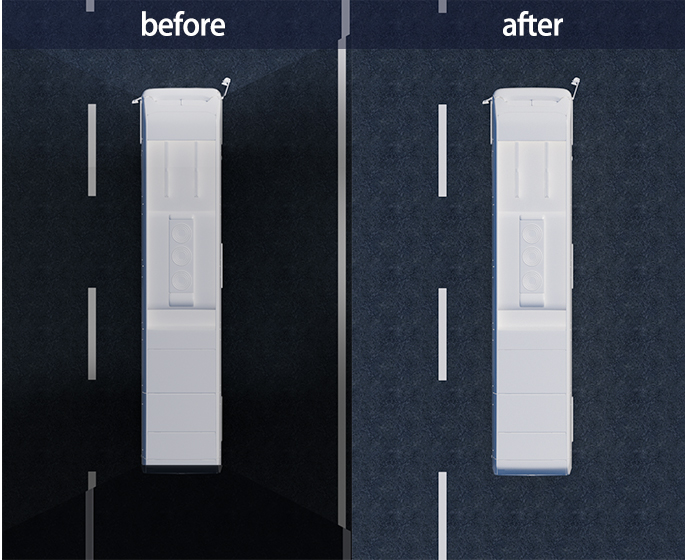
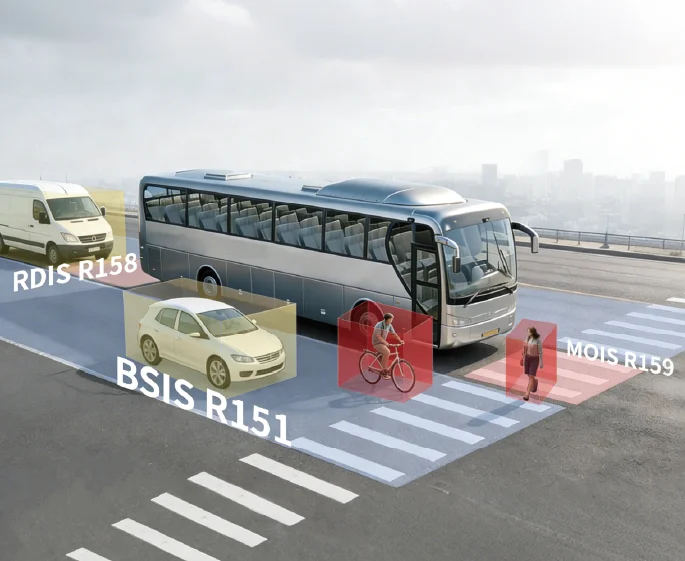
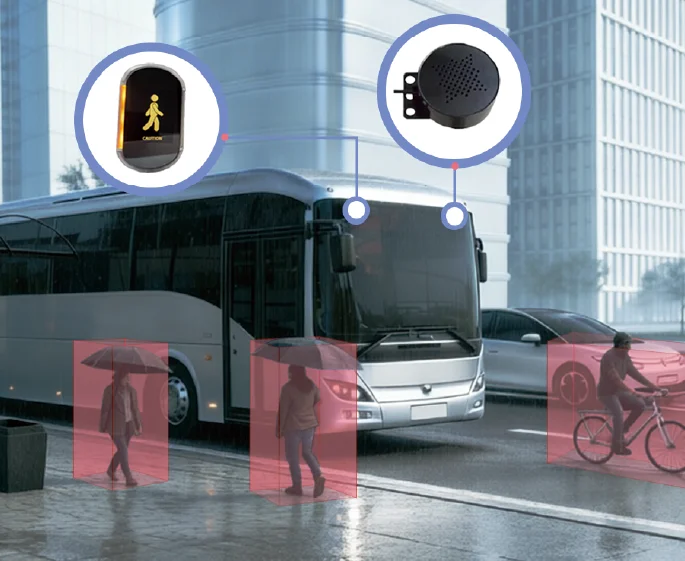
UN Regulation R151/R159/R158
View More

























01
02
03
04
05
06
07
08
09